.jpg)
.jpg)
.jpg)
.jpg)
नेमा २३ (५७ मिमी) हायब्रिड स्टेपर मोटर, बायपोलर, ४-लीड, एसीएमई लीड स्क्रू, कमी आवाज, दीर्घ आयुष्य, उच्च कार्यक्षमता.
नेमा २३ (५७ मिमी) हायब्रिड स्टेपर मोटर, बायपोलर, ४-लीड, एसीएमई लीड स्क्रू, कमी आवाज, दीर्घ आयुष्य, उच्च कार्यक्षमता.
ही ५७ मिमी हायब्रिड स्टेपर मोटर तीन प्रकारांमध्ये उपलब्ध आहे: बाह्यरित्या चालित, थ्रू-अक्ष आणि थ्रू-फिक्स्ड-अक्ष. तुम्ही तुमच्या विशिष्ट गरजांनुसार निवडू शकता.
ही मोटर २० मिमी, २८ मिमी, ३५ मिमी, ४२ मिमी, ५७ मिमी, ८६ मिमी आकारात उपलब्ध आहे.
पायरीची लांबी, ०.००१५२४ मिमी~०.१२७ मिमी
कामगिरी २४० किलो पर्यंत जास्तीत जास्त थ्रस्ट, कमी तापमान वाढ, कमी कंपन, कमी आवाज, दीर्घ आयुष्य (५ दशलक्ष चक्रांपर्यंत), उच्च स्थिती अचूकता (±०.०१ मिमी पर्यंत)
वर्णने
| उत्पादनाचे नाव | ५७ मिमी हायब्रिड स्टेपर मोटर्स |
| मॉडेल | VSM57HSM साठी चौकशी सबमिट करा, आम्ही तुमच्याशी २४ तासांत संपर्क करू. |
| प्रकार | हायब्रिड स्टेपर मोटर्स |
| स्टेप अँगल | १.८° |
| व्होल्टेज (V) | २.३ / ३ / ३.१ / ३.८ |
| वर्तमान (अ) | ३/४ |
| प्रतिकार (ओहम्स) | ०.७५ / १ / ०.७८ / ०.९५ |
| इंडक्टन्स (एमएच) | २.५ / ४.५ / ३.३ / ४.५ |
| शिशाच्या तारा | 4 |
| मोटर लांबी (मिमी) | ४५ / ५५ / ६५ / ७५ |
| वातावरणीय तापमान | -२०℃ ~ +५०℃ |
| तापमान वाढ | कमाल ८० हजार. |
| डायलेक्ट्रिक शक्ती | १ एमए कमाल. @ ५०० व्ही, १ किलोहर्ट्झ, १ सेकंद. |
| इन्सुलेशन प्रतिरोध | १००MΩ किमान @५००Vdc |
प्रमाणपत्रे

विद्युत मापदंड:
| मोटर आकार | विद्युतदाब /टप्पा (व्ही) | चालू /टप्पा (अ) | प्रतिकार /टप्पा (Ω) | प्रेरण /टप्पा (मिलीएच) | संख्या शिशाच्या तारा | रोटर जडत्व (ग्रॅम सेमी2) | मोटर वजन (छ) | मोटर लांबी एल (मिमी) |
| 57 | २.३ | 3 | ०.७५ | २.५ | 4 | १५० | ५८० | 45 |
| 57 | 3 | 3 | 1 | ४.५ | 4 | ३०० | ७१० | 55 |
| 57 | ३.१ | 4 | ०.७८ | ३.३ | 4 | ४०० | ८८० | 65 |
| 57 | ३.८ | 4 | ०.९५ | ४.५ | 4 | ४८० | ९५० | 75 |
लीड स्क्रू स्पेसिफिकेशन्स आणि परफॉर्मन्स पॅरामीटर्स
| व्यास (मिमी) | शिसे (मिमी) | पाऊल (मिमी) | सेल्फ-लॉकिंग फोर्स बंद करा (एन) |
| ९.५२५ | १.२७ | ०.००६३५ | ८०० |
| ९.५२५ | २.५४ | ०.०१२७ | ३०० |
| ९.५२५ | ५.०८ | ०.०२५४ | 90 |
| ९.५२५ | १०.१६ | ०.०५०८ | 30 |
| ९.५२५ | २५.४ | ०.१२७ | 6 |
टीप: अधिक लीड स्क्रू स्पेसिफिकेशन्ससाठी, कृपया आमच्याशी संपर्क साधा.
VSM57HSM मानक बाह्य मोटर बाह्यरेखा रेखाचित्र:
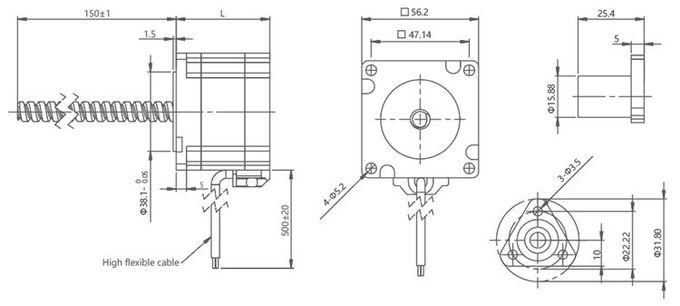
टिपा:
लीड स्क्रूची लांबी सानुकूलित केली जाऊ शकते
लीड स्क्रूच्या शेवटी कस्टमाइज्ड मशीनिंग व्यवहार्य आहे.
५७ मिमी हायब्रिड स्टेपर मोटर्स मानक कॅप्टिव्ह मोटर बाह्यरेखा रेखाचित्र:
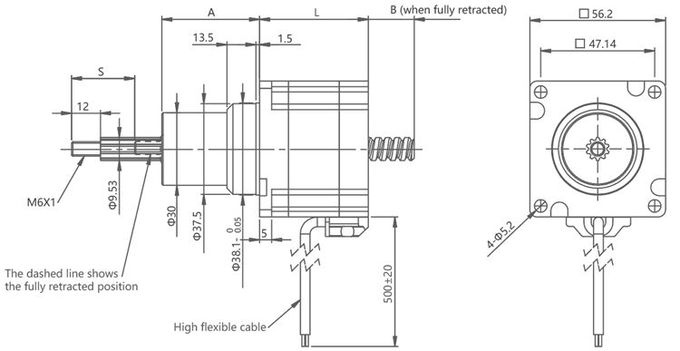
टिपा:
लीड स्क्रूच्या शेवटी कस्टमाइज्ड मशीनिंग व्यवहार्य आहे.
| स्ट्रोक एस (मिमी) | परिमाण अ (मिमी) | आकारमान बी (मिमी) | |||
| एल = ४५ | एल = ५५ | एल = ६५ | एल = ७५ | ||
| १२.७ | २४.१ | १.१ | 0 | 0 | 0 |
| १९.१ | ३०.५ | ७.५ | 0 | 0 | 0 |
| २५.४ | ३६.८ | १३.८ | ४.८ | 0 | 0 |
| ३१.८ | ४३.२ | २०.२ | ११.२ | ०.२ | 0 |
| ३८.१ | ४९.५ | २६.५ | १७.५ | ६.५ | 0 |
| ५०.८ | ६२.२ | ३९.२ | ३०.२ | १९.२ | ९.१ |
| ६३.५ | ७४.९ | ५१.९ | ४२.९ | ३१.९ | २१.९ |
५७ मिमी हायब्रिड स्टेपर मोटर स्टँडर्ड थ्रू-फिक्स्ड मोटर आउटलाइन ड्रॉइंग
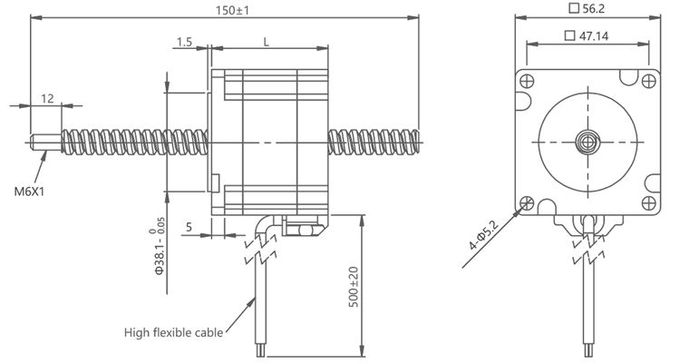
टिपा:
लीड स्क्रूची लांबी सानुकूलित केली जाऊ शकते
लीड स्क्रूच्या शेवटी कस्टमाइज्ड मशीनिंग व्यवहार्य आहे.
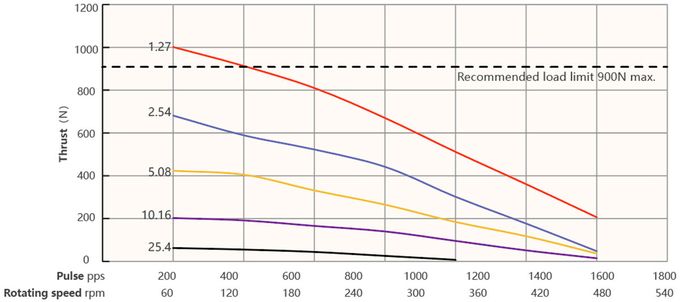
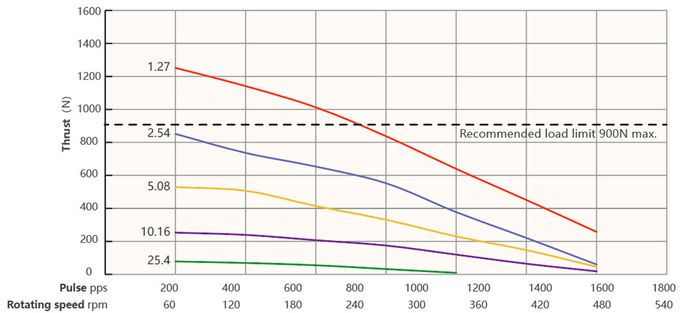
वेग आणि जोर वक्र:
५७ मालिका ४५ मिमी मोटर लांबी बायपोलर चॉपर ड्राइव्ह
१००% करंट पल्स फ्रिक्वेन्सी आणि थ्रस्ट कर्व्ह (Φ९.५२५ मिमी लीड स्क्रू)
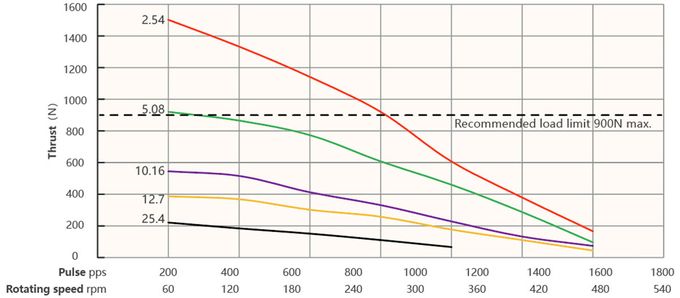
५७ मालिका ५५ मिमी मोटर लांबी बायपोलर चॉपर ड्राइव्ह
१००% करंट पल्स फ्रिक्वेन्सी आणि थ्रस्ट कर्व्ह (Φ९.५२५ मिमी लीड स्क्रू)
| शिसे (मिमी) | रेषीय वेग (मिमी/से) | ||||||||
| १.२७ | १.२७ | २.५४ | ३.८१ | ५.०८ | ६.३५ | ७.६२ | ८.८९ | १०.१६ | ११.४३ |
| २.५४ | २.५४ | ५.०८ | ७.६२ | १०.१६ | १२.७ | १५.२४ | १७.७८ | २०.३२ | २२.८६ |
| ५.०८ | ५.०८ | १०.१६ | १५.२४ | २०.३२ | २५.४ | ३०.४८ | ३५.५६ | ४०.६४ | ४५.७२ |
| १०.१६ | १०.१६ | २०.३२ | ३०.४८ | ४०.६४ | ५०.८ | ६०.९६ | ७१.१२ | ८१.२८ | ९१.४४ |
| २५.४ | २५.४ | ५०.८ | ७६.२ | १०१.६ | १२७ | १५२.४ | ७११.८ | २०३.२ | २२८.६ |
चाचणी स्थिती:
चॉपर ड्राइव्ह, रॅम्पिंग नाही, हाफ मायक्रो-स्टेपिंग, ड्राइव्ह व्होल्टेज ४० व्ही
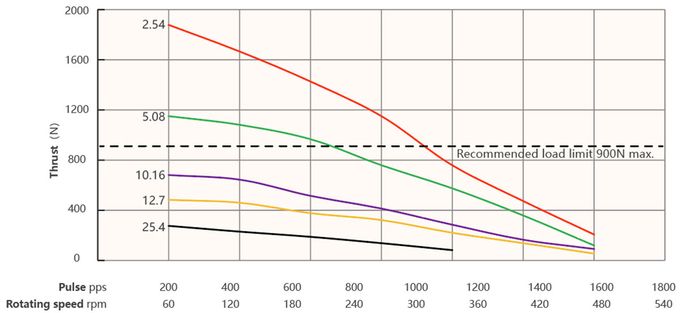
५७ मालिका ६५ मिमी मोटर लांबी बायपोलर चॉपर ड्राइव्ह
१००% करंट पल्स फ्रिक्वेन्सी आणि थ्रस्ट कर्व्ह (Φ९.५२५ मिमी लीड स्क्रू)
५७ मालिका ७५ मिमी मोटर लांबी बायपोलर चॉपर ड्राइव्ह
१००% करंट पल्स फ्रिक्वेन्सी आणि थ्रस्ट कर्व्ह (Φ९.५२५ मिमी लीड स्क्रू)
| शिसे (मिमी) | रेषीय वेग (मिमी/से) | ||||||||
| १.२७ | १.२७ | २.५४ | ३.८१ | ५.०८ | ६.३५ | ७.६२ | ८.८९ | १०.१६ | ११.४३ |
| २.५४ | २.५४ | ५.०८ | ७.६२ | १०.१६ | १२.७ | १५.२४ | १७.७८ | २०.३२ | २२.८६ |
| ५.०८ | ५.०८ | १०.१६ | १५.२४ | २०.३२ | २५.४ | ३०.४८ | ३५.५६ | ४०.६४ | ४५.७२ |
| १०.१६ | १०.१६ | २०.३२ | ३०.४८ | ४०.६४ | ५०.८ | ६०.९६ | ७१.१२ | ८१.२८ | ९१.४४ |
| २५.४ | २५.४ | ५०.८ | ७६.२ | १०१.६ | १२७ | १५२.४ | ७११.८ | २०३.२ | २२८.६ |
चाचणी स्थिती:
चॉपर ड्राइव्ह, रॅम्पिंग नाही, हाफ मायक्रो-स्टेपिंग, ड्राइव्ह व्होल्टेज ४० व्ही
अर्जाची क्षेत्रे
३डी प्रिंटिंग:प्रिंट हेडची स्थिती आणि हालचाल नियंत्रित करण्यासाठी 3D प्रिंटरमध्ये 57 मिमी हायब्रिड स्टेपर मोटर्सचा मोठ्या प्रमाणावर वापर केला जातो.
सीएनसी मशीन टूल्स:संगणक संख्यात्मक नियंत्रण (CNC) मशीन टूल्समध्ये, अचूक मशीनिंग ऑपरेशन्ससाठी कटिंग टूल्सच्या हालचाली नियंत्रित करण्यासाठी 57 मिमी हायब्रिड स्टेपर मोटर्स वापरल्या जातात.
ऑटोमेशन उपकरणे:५७ मिमी हायब्रिड स्टेपर मोटर्सचा वापर विविध ऑटोमेशन उपकरणांमध्ये केला जाऊ शकतो, जसे की ऑटोमॅटिक पॅकेजिंग मशीन, ऑटोमॅटिक सॉर्टिंग सिस्टम, ऑटोमॅटिक असेंब्ली लाईन्स इत्यादी, हालचाल आणि स्थिती नियंत्रित करण्यासाठी.
कापड यंत्रसामग्री:कापड उद्योगात, कापड प्रक्रियेची अचूकता आणि स्थिरता सुनिश्चित करण्यासाठी स्पिनिंग मशीन, लूम आणि इतर उपकरणे नियंत्रित करण्यासाठी 57 मिमी हायब्रिड स्टेपर मोटर्स वापरल्या जाऊ शकतात.
वैद्यकीय उपकरणे:५७ मिमी हायब्रिड स्टेपर मोटर्स वैद्यकीय उपकरणांमध्ये जसे की वैद्यकीय सिरिंज पंप, वैद्यकीय रोबोट्स, प्रतिमा स्कॅनिंग उपकरणे इत्यादींमध्ये अचूक स्थिती नियंत्रण आणि गती नियंत्रणासाठी मोठ्या प्रमाणावर वापरले जातात.
रोबोटिक्स:अचूक गती आणि हाताळणीसाठी औद्योगिक रोबोट्स, सर्व्हिस रोबोट्स, सहयोगी रोबोट्स इत्यादींसह विविध रोबोटिक्स अनुप्रयोगांमध्ये ५७ मिमी हायब्रिड स्टेपर मोटर्स वापरल्या जातात.
स्वयंचलित गोदाम प्रणाली:ऑटोमेटेड वेअरहाऊसिंग आणि लॉजिस्टिक्स सिस्टीममध्ये, ५७ मिमी हायब्रिड स्टेपर मोटर्सचा वापर कन्व्हेयर बेल्ट, लिफ्ट, स्टेकर क्रेन आणि इतर उपकरणे नियंत्रित करण्यासाठी केला जाऊ शकतो जेणेकरून वस्तूंची अचूक स्थिती आणि हाताळणी साध्य होईल.
हे फक्त ५७ मिमी हायब्रिड स्टेपर मोटर्सचे काही विशिष्ट अनुप्रयोग आहेत आणि खरं तर, ते छपाई उपकरणे, सुरक्षा प्रणाली, अचूक उपकरणे इत्यादींसह इतर अनेक क्षेत्रांमध्ये मोठ्या प्रमाणावर वापरले जातात.
फायदा
उच्च टॉर्क-टू-साईज रेशो:त्यांच्या कॉम्पॅक्ट आकार असूनही, ५७ मिमी हायब्रिड स्टेपर मोटर्स उच्च टॉर्क आउटपुट देऊ शकतात. यामुळे ते अशा अनुप्रयोगांसाठी योग्य बनतात जिथे जागा मर्यादित आहे, परंतु उच्च टॉर्क आवश्यक आहे.
ओपन-लूप नियंत्रण:हायब्रिड स्टेपर मोटर्स ओपन-लूप कंट्रोल सिस्टीममध्ये काम करू शकतात, याचा अर्थ त्यांना एन्कोडरसारख्या पोझिशन फीडबॅक डिव्हाइसेसची आवश्यकता नसते. हे नियंत्रण प्रणाली सुलभ करते आणि एकूण खर्च कमी करते.
अचूक स्थान:हायब्रिड स्टेपर मोटर्स त्यांच्या अंतर्निहित स्टेप रिझोल्यूशनमुळे अचूक पोझिशनिंग क्षमता प्रदान करतात. ते लहान वाढीमध्ये हलू शकतात, ज्यामुळे अचूक पोझिशनिंग आणि पुनरावृत्तीक्षमता मिळते.
सुरळीत ऑपरेशन:हायब्रिड स्टेपर मोटर्स सुरळीतपणे चालवता येतात, विशेषतः जेव्हा मायक्रोस्टेपिंग तंत्रांनी चालवले जाते. मायक्रोस्टेपिंग प्रत्येक पायरीला लहान उप-चरणांमध्ये विभागते, परिणामी गती सुरळीत होते आणि कंपन कमी होते.
जलद प्रतिसाद वेळ:हायब्रिड स्टेपर मोटर्समध्ये जलद प्रतिसाद वेळ असतो, ज्यामुळे जलद प्रवेग आणि मंदावणे शक्य होते. गतिमान आणि चपळ हालचालींची आवश्यकता असलेल्या अनुप्रयोगांसाठी हे वैशिष्ट्य फायदेशीर आहे.
उच्च विश्वसनीयता आणि टिकाऊपणा:हायब्रिड स्टेपर मोटर्स त्यांच्या मजबूती आणि विश्वासार्हतेसाठी ओळखल्या जातात. त्यांचे ऑपरेशनल आयुष्य जास्त असते, देखभालीची आवश्यकता कमी असते आणि ते कठोर ऑपरेटिंग परिस्थितींना तोंड देऊ शकतात.
किफायतशीर उपाय:सर्वो मोटर्ससारख्या इतर गती नियंत्रण तंत्रज्ञानाच्या तुलनेत, हायब्रिड स्टेपर मोटर्स सामान्यतः अधिक किफायतशीर उपाय देतात. ते कामगिरी आणि परवडण्यामध्ये चांगले संतुलन प्रदान करतात.
सोपे एकत्रीकरण:हायब्रिड स्टेपर मोटर्स मोठ्या प्रमाणात उपलब्ध आहेत आणि विविध ड्राइव्ह इलेक्ट्रॉनिक्स आणि नियंत्रण प्रणालींशी सुसंगत आहेत. ते विविध प्रकारच्या यंत्रसामग्री आणि ऑटोमेशन सेटअपमध्ये सहजपणे एकत्रित केले जाऊ शकतात.
ऊर्जा कार्यक्षमता:हायब्रिड स्टेपर मोटर्स फक्त गतिमान असतानाच वीज वापरतात, ज्यामुळे त्यांना ऊर्जा-कार्यक्षम बनवले जाते. जेव्हा ते स्थिर असतात तेव्हा त्यांना सतत वीज आवश्यक नसते, ज्यामुळे एकूण ऊर्जा बचत होते.
मोटर निवड आवश्यकता:
► हालचाल/माउंटिंग दिशा
► लोड आवश्यकता
►स्ट्रोक आवश्यकता
► मशीनिंग आवश्यकता पूर्ण करा
► अचूकता आवश्यकता
► एन्कोडर फीडबॅक आवश्यकता
►मॅन्युअल समायोजन आवश्यकता
►पर्यावरणीय आवश्यकता
उत्पादन कार्यशाळा


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)