.jpg)
.jpg)
.jpg)
.jpg)
नेमा २३ (५७ मिमी) हायब्रीड स्टेपर मोटर, बायपोलर, ४-लीड, एसीएमई लीड स्क्रू, कमी आवाज, दीर्घायुष्य, उच्च कार्यक्षमता.
नेमा २३ (५७ मिमी) हायब्रीड स्टेपर मोटर, बायपोलर, ४-लीड, एसीएमई लीड स्क्रू, कमी आवाज, दीर्घायुष्य, उच्च कार्यक्षमता.
ही ५७ मिमी हायब्रीड स्टेपर मोटर तीन प्रकारांमध्ये उपलब्ध आहे: एक्सटर्नली ड्रिव्हन, थ्रू-ॲक्सिस आणि थ्रू-फिक्स्ड-ॲक्सिस. तुम्ही तुमच्या विशिष्ट गरजेनुसार निवड करू शकता.
ही मोटर २० मिमी, २८ मिमी, ३५ मिमी, ४२ मिमी, ५७ मिमी, ८६ मिमी या आकारांमध्ये उपलब्ध आहे.
पायरीची लांबी, ०.००१५२४ मिमी~०.१२७ मिमी
कार्यक्षमता: २४० किलो पर्यंत कमाल थ्रस्ट, कमी तापमान वाढ, कमी कंपन, कमी आवाज, दीर्घायुष्य (५० लाख सायकल पर्यंत), उच्च पोझिशनिंग अचूकता (±०.०१ मिमी पर्यंत)
वर्णने
| उत्पादनाचे नाव | ५७ मिमी हायब्रीड स्टेपर मोटर्स |
| मॉडेल | व्हीएसएम५७एचएसएम |
| प्रकार | हायब्रीड स्टेपर मोटर्स |
| पायरीचा कोन | १.८° |
| व्होल्टेज (V) | २.३ / ३ / ३.१ / ३.८ |
| वर्तमान (ए) | ३/४ |
| रोध (ओहम) | ०.७५ / १ / ०.७८ / ०.९५ |
| प्रेरकत्व (mH) | २.५ / ४.५ / ३.३ / ४.५ |
| लीड वायर्स | 4 |
| मोटरची लांबी (मिमी) | ४५ / ५५ / ६५ / ७५ |
| सभोवतालचे तापमान | -२०℃ ~ +५०℃ |
| तापमान वाढ | कमाल ८० हजार. |
| डायलेक्ट्रिक सामर्थ्य | 1mA कमाल @ 500V, 1KHz, 1 सेकंद. |
| इन्सुलेशन प्रतिरोध | १०० मेगाओहम किमान @५०० व्होल्ट डीसी |
प्रमाणपत्रे

विद्युत मापदंड:
| मोटरचा आकार | व्होल्टेज /फेज (व्ही) | वर्तमान /फेज (अ) | प्रतिकार /फेज (Ω) | इंडक्टन्स /फेज (एमएच) | संख्या लीड वायर्स | रोटर जडत्व (ग्रॅम.सेमी)2) | मोटरचे वजन (g) | मोटरची लांबी L (मिमी) |
| 57 | २.३ | 3 | ०.७५ | २.५ | 4 | १५० | ५८० | 45 |
| 57 | 3 | 3 | 1 | ४.५ | 4 | ३०० | ७१० | 55 |
| 57 | ३.१ | 4 | ०.७८ | ३.३ | 4 | ४०० | ८८० | 65 |
| 57 | ३.८ | 4 | ०.९५ | ४.५ | 4 | ४८० | ९५० | 75 |
लीड स्क्रूची वैशिष्ट्ये आणि कार्यप्रदर्शन मापदंड
| व्यास (मिमी) | नेतृत्व (मिमी) | पायरी (मिमी) | सेल्फ-लॉकिंग फोर्स बंद करा (एन) |
| ९.५२५ | १.२७ | ०.००६३५ | ८०० |
| ९.५२५ | २.५४ | ०.०१२७ | ३०० |
| ९.५२५ | ५.०८ | ०.०२५४ | 90 |
| ९.५२५ | १०.१६ | ०.०५०८ | 30 |
| ९.५२५ | २५.४ | ०.१२७ | 6 |
टीप: लीड स्क्रूच्या अधिक तपशिलांसाठी, कृपया आमच्याशी संपर्क साधा.
VSM57HSM मानक बाह्य मोटरची बाह्यरेखा रेखाचित्र:
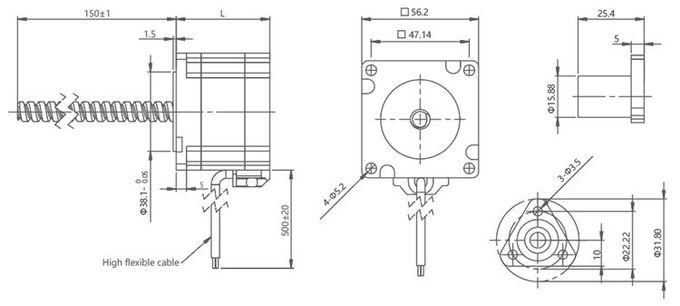
टीपा:
लीड स्क्रूची लांबी गरजेनुसार बदलता येते.
लीड स्क्रूच्या टोकावर सानुकूलित मशीनिंग करणे शक्य आहे.
५७ मिमी हायब्रीड स्टेपर मोटर्सचे मानक कॅप्टिव्ह मोटर बाह्यरेखा रेखाचित्र:
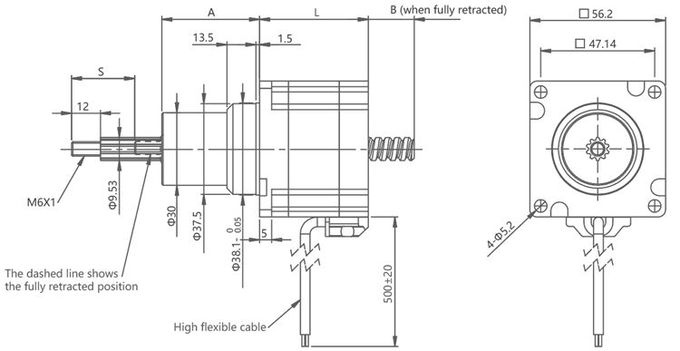
टीपा:
लीड स्क्रूच्या टोकावर सानुकूलित मशीनिंग करणे शक्य आहे.
| स्ट्रोक एस (मिमी) | परिमाण अ (मिमी) | परिमाण B (मिमी) | |||
| एल = ४५ | एल = ५५ | एल = ६५ | एल = ७५ | ||
| १२.७ | २४.१ | १.१ | 0 | 0 | 0 |
| १९.१ | ३०.५ | ७.५ | 0 | 0 | 0 |
| २५.४ | ३६.८ | १३.८ | ४.८ | 0 | 0 |
| ३१.८ | ४३.२ | २०.२ | ११.२ | ०.२ | 0 |
| ३८.१ | ४९.५ | २६.५ | १७.५ | ६.५ | 0 |
| ५०.८ | ६२.२ | ३९.२ | ३०.२ | १९.२ | ९.१ |
| ६३.५ | ७४.९ | ५१.९ | ४२.९ | ३१.९ | २१.९ |
५७ मिमी हायब्रीड स्टेपर मोटर स्टँडर्ड थ्रू-फिक्स्ड मोटर आउटलाइन ड्रॉइंग
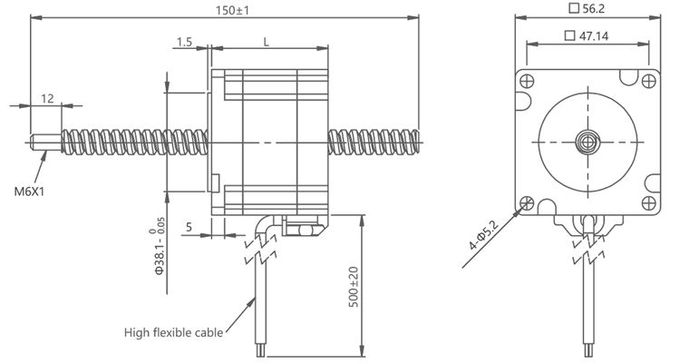
टीपा:
लीड स्क्रूची लांबी गरजेनुसार बदलता येते.
लीड स्क्रूच्या टोकावर सानुकूलित मशीनिंग करणे शक्य आहे.
वेग आणि जोर वक्र:
५७ सिरीज ४५ मिमी मोटर लांबीचा बायपोलर चॉपर ड्राइव्ह
१००% वर्तमान पल्स वारंवारता आणि थ्रस्ट वक्र (Φ९.५२५ मिमी लीड स्क्रू)
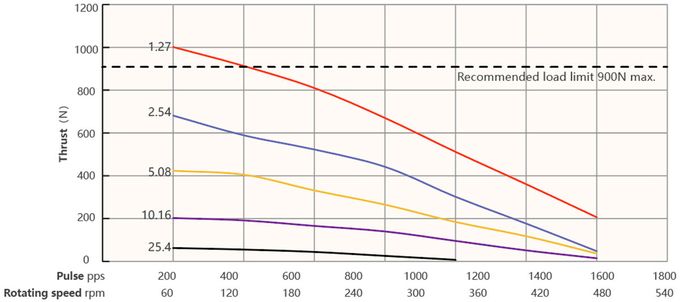
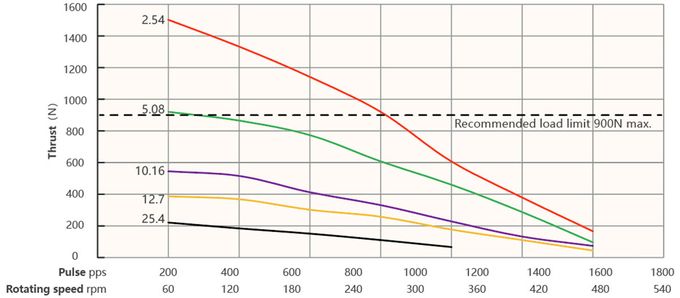
५७ सिरीज ५५ मिमी मोटर लांबीचा बायपोलर चॉपर ड्राइव्ह
१००% वर्तमान पल्स वारंवारता आणि थ्रस्ट वक्र (Φ९.५२५ मिमी लीड स्क्रू)
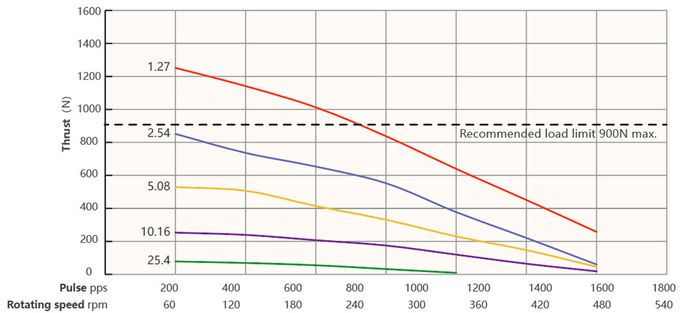
| शिसे (मिमी) | रेषीय वेग (मिमी/से) | ||||||||
| १.२७ | १.२७ | २.५४ | ३.८१ | ५.०८ | ६.३५ | ७.६२ | ८.८९ | १०.१६ | ११.४३ |
| २.५४ | २.५४ | ५.०८ | ७.६२ | १०.१६ | १२.७ | १५.२४ | १७.७८ | २०.३२ | २२.८६ |
| ५.०८ | ५.०८ | १०.१६ | १५.२४ | २०.३२ | २५.४ | ३०.४८ | ३५.५६ | ४०.६४ | ४५.७२ |
| १०.१६ | १०.१६ | २०.३२ | ३०.४८ | ४०.६४ | ५०.८ | ६०.९६ | ७१.१२ | ८१.२८ | ९१.४४ |
| २५.४ | २५.४ | ५०.८ | ७६.२ | १०१.६ | १२७ | १५२.४ | ७११.८ | २०३.२ | २२८.६ |
चाचणीची अट:
चॉपर ड्राइव्ह, रॅम्पिंग नाही, अर्ध मायक्रो-स्टेपिंग, ड्राइव्ह व्होल्टेज ४०V
५७ सिरीज ६५ मिमी मोटर लांबीचा बायपोलर चॉपर ड्राइव्ह
१००% वर्तमान पल्स वारंवारता आणि थ्रस्ट वक्र (Φ९.५२५ मिमी लीड स्क्रू)
५७ सिरीज ७५ मिमी मोटर लांबीचा बायपोलर चॉपर ड्राइव्ह
१००% वर्तमान पल्स वारंवारता आणि थ्रस्ट वक्र (Φ९.५२५ मिमी लीड स्क्रू)
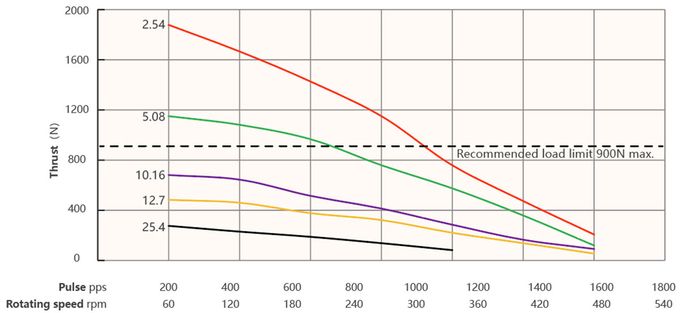
| शिसे (मिमी) | रेषीय वेग (मिमी/से) | ||||||||
| १.२७ | १.२७ | २.५४ | ३.८१ | ५.०८ | ६.३५ | ७.६२ | ८.८९ | १०.१६ | ११.४३ |
| २.५४ | २.५४ | ५.०८ | ७.६२ | १०.१६ | १२.७ | १५.२४ | १७.७८ | २०.३२ | २२.८६ |
| ५.०८ | ५.०८ | १०.१६ | १५.२४ | २०.३२ | २५.४ | ३०.४८ | ३५.५६ | ४०.६४ | ४५.७२ |
| १०.१६ | १०.१६ | २०.३२ | ३०.४८ | ४०.६४ | ५०.८ | ६०.९६ | ७१.१२ | ८१.२८ | ९१.४४ |
| २५.४ | २५.४ | ५०.८ | ७६.२ | १०१.६ | १२७ | १५२.४ | ७११.८ | २०३.२ | २२८.६ |
चाचणीची अट:
चॉपर ड्राइव्ह, रॅम्पिंग नाही, अर्ध मायक्रो-स्टेपिंग, ड्राइव्ह व्होल्टेज ४०V
अनुप्रयोगाची क्षेत्रे
३डी प्रिंटिंग:प्रिंट हेडची स्थिती आणि हालचाल नियंत्रित करण्यासाठी 3D प्रिंटरमध्ये 57mm हायब्रीड स्टेपर मोटर्सचा मोठ्या प्रमाणावर वापर केला जातो.
सीएनसी मशीन टूल्स:कॉम्प्युटर न्यूमेरिकल कंट्रोल (CNC) मशीन टूल्समध्ये, अचूक मशीनिंग कार्यांसाठी कटिंग टूल्सच्या हालचाली नियंत्रित करण्यासाठी 57mm हायब्रीड स्टेपर मोटर्सचा वापर केला जातो.
स्वयंचलित उपकरणे:57mm हायब्रीड स्टेपर मोटर्सचा वापर स्वयंचलित पॅकेजिंग मशीन, स्वयंचलित वर्गीकरण प्रणाली, स्वयंचलित असेंब्ली लाइन्स इत्यादी विविध ऑटोमेशन उपकरणांमध्ये हालचाल आणि स्थिती नियंत्रित करण्यासाठी केला जाऊ शकतो.
वस्त्रोद्योग यंत्रसामग्री:वस्त्रोद्योग क्षेत्रात, सूतकताई यंत्रे, हातमाग आणि इतर उपकरणे नियंत्रित करण्यासाठी ५७ मिमी हायब्रीड स्टेपर मोटर्सचा वापर केला जाऊ शकतो, ज्यामुळे वस्त्र प्रक्रियेची अचूकता आणि स्थिरता सुनिश्चित होते.
वैद्यकीय उपकरणे:57mm हायब्रीड स्टेपर मोटर्सचा वापर वैद्यकीय सिरिंज पंप, वैद्यकीय रोबोट, इमेज स्कॅनिंग उपकरणे इत्यादी वैद्यकीय उपकरणांमध्ये अचूक स्थिती नियंत्रण आणि गती नियंत्रणासाठी मोठ्या प्रमाणावर केला जातो.
रोबोटिक्स:57mm हायब्रीड स्टेपर मोटर्सचा वापर औद्योगिक रोबोट्स, सर्व्हिस रोबोट्स, कोलाबरेटिव्ह रोबोट्स इत्यादींसह विविध रोबोटिक्स ऍप्लिकेशन्समध्ये अचूक हालचाल आणि हाताळणीसाठी केला जातो.
स्वयंचलित गोदाम प्रणाली:स्वयंचलित वेअरहाउसिंग आणि लॉजिस्टिक्स प्रणालींमध्ये, वस्तूंचे अचूक स्थान निश्चिती आणि हाताळणी साध्य करण्यासाठी कन्व्हेयर बेल्ट, लिफ्ट, स्टॅकर क्रेन आणि इतर उपकरणांना नियंत्रित करण्याकरिता ५७ मिमी हायब्रीड स्टेपर मोटर्सचा वापर केला जाऊ शकतो.
हे 57mm हायब्रीड स्टेपर मोटर्सचे काही ठराविक उपयोग आहेत आणि वास्तविक पाहता, छपाई उपकरणे, सुरक्षा प्रणाली, अचूक उपकरणे इत्यादींसह इतर अनेक क्षेत्रांमध्ये त्यांचा मोठ्या प्रमाणावर वापर केला जातो.
फायदा
उच्च टॉर्क-टू-साईझ गुणोत्तर:आकाराने लहान असूनही, ५७ मिमी हायब्रीड स्टेपर मोटर्स उच्च टॉर्क आउटपुट देऊ शकतात. यामुळे, ज्या ठिकाणी जागा मर्यादित आहे, परंतु उच्च टॉर्कची आवश्यकता आहे, अशा अनुप्रयोगांसाठी त्या योग्य ठरतात.
ओपन-लूप नियंत्रण:हायब्रीड स्टेपर मोटर्स ओपन-लूप नियंत्रण प्रणालीमध्ये काम करू शकतात, म्हणजेच त्यांना एन्कोडरसारख्या स्थिती अभिप्राय उपकरणांची आवश्यकता नसते. यामुळे नियंत्रण प्रणाली सोपी होते आणि एकूण खर्च कमी होतो.
अचूक स्थिती:हायब्रीड स्टेपर मोटर्स त्यांच्या अंगभूत स्टेप रिझोल्यूशनमुळे अचूक पोझिशनिंग क्षमता प्रदान करतात. त्या लहान लहान टप्प्यांमध्ये हालचाल करू शकतात, ज्यामुळे अचूक पोझिशनिंग आणि पुनरावृत्तीक्षमता शक्य होते.
सुरळीत कार्यप्रणाली:हायब्रीड स्टेपर मोटर्स सुरळीतपणे कार्य करू शकतात, विशेषतः जेव्हा त्यांना मायक्रोस्टेपिंग तंत्रज्ञानाने चालवले जाते. मायक्रोस्टेपिंगमध्ये प्रत्येक स्टेपला लहान उप-स्टेप्समध्ये विभागले जाते, ज्यामुळे हालचाल अधिक सुरळीत होते आणि कंपन कमी होते.
जलद प्रतिसाद वेळ:हायब्रीड स्टेपर मोटर्सचा प्रतिसाद जलद असतो, ज्यामुळे वेगाने गती वाढवणे आणि कमी करणे शक्य होते. गतिमान आणि चपळ हालचालींची आवश्यकता असलेल्या अनुप्रयोगांसाठी हे वैशिष्ट्य फायदेशीर आहे.
उच्च विश्वसनीयता आणि टिकाऊपणा:हायब्रीड स्टेपर मोटर्स त्यांच्या मजबुती आणि विश्वासार्हतेसाठी ओळखल्या जातात. त्यांचे कार्यकाळ दीर्घ असतो, त्यांना कमी देखभालीची आवश्यकता असते आणि त्या खडतर कार्य परिस्थितीचा सामना करू शकतात.
किफायतशीर उपाय:सर्वो मोटर्ससारख्या इतर मोशन कंट्रोल तंत्रज्ञानाच्या तुलनेत, हायब्रीड स्टेपर मोटर्स सामान्यतः अधिक किफायतशीर पर्याय ठरतात. त्या कार्यक्षमता आणि परवडण्याजोगी किंमत यांच्यात उत्तम संतुलन साधतात.
सुलभ एकीकरण:हायब्रीड स्टेपर मोटर्स मोठ्या प्रमाणावर उपलब्ध असून त्या विविध ड्राइव्ह इलेक्ट्रॉनिक्स आणि नियंत्रण प्रणालींशी सुसंगत आहेत. त्यांना वेगवेगळ्या प्रकारच्या यंत्रसामग्री आणि ऑटोमेशन सेटअपमध्ये सहजपणे समाकलित केले जाऊ शकते.
ऊर्जा कार्यक्षमता:हायब्रीड स्टेपर मोटर्स फक्त गतिमान असतानाच वीज वापरतात, ज्यामुळे त्या ऊर्जा-कार्यक्षम ठरतात. स्थिर असताना, त्यांना सतत विजेची आवश्यकता नसते, ज्यामुळे एकूण ऊर्जा बचतीस हातभार लागतो.
मोटर निवडीसाठीच्या आवश्यकता:
► हालचाल/जोडणीची दिशा
►लोड आवश्यकता
►स्ट्रोक आवश्यकता
►अंतिम मशीनिंग आवश्यकता
► अचूकतेच्या आवश्यकता
►एनकोडर फीडबॅक आवश्यकता
►मॅन्युअल समायोजन आवश्यकता
►पर्यावरणीय आवश्यकता
उत्पादन कार्यशाळा


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)