




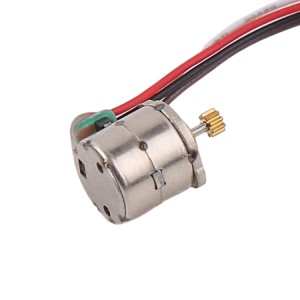
प्रिंटरसाठी उच्च टॉर्क मायक्रो ३५ मिमी स्टेपर मोटर
वर्णन
स्टेपर मोटर्ससाठी वाइंडिंगच्या दोन पद्धती आहेत: बायपोलर आणि युनिपोलर.
१. बायपोलर मोटर्स
आमच्या बायपोलर मोटर्समध्ये सामान्यतः फक्त दोन फेज असतात, फेज A आणि फेज B, आणि प्रत्येक फेजला दोन आउटगोइंग वायर्स असतात, ज्या स्वतंत्र वाइंडिंग असतात. दोन्ही फेजमध्ये कोणतेही कनेक्शन नसते. बायपोलर मोटर्समध्ये ४ आउटगोइंग वायर्स असतात.
२. एकध्रुवीय मोटर्स
आमच्या युनिपोलर मोटर्समध्ये सामान्यतः चार फेज असतात. बायपोलर मोटर्सच्या दोन फेजच्या आधारावर, दोन कॉमन लाईन्स जोडल्या जातात.
जर कॉमन वायर्स एकत्र जोडल्या तर, आउटगोइंग वायर्स ५ असतात.
जर कॉमन वायर्स एकत्र जोडलेल्या नसतील, तर आउटगोइंग वायर्स ६ असतात.
युनिपोलर मोटरला ५ किंवा ६ आउटगोइंग लाईन्स असतात.
पॅरामीटर्स
| व्होल्टेज | ८ डीव्ही डीसी |
| टप्प्याची संख्या | ४ फेज |
| पायरीचा कोन | ७.५°±७% |
| वाइंडिंग रेझिस्टन्स (25℃) | १६Ω±१०% |
| वर्तमान टप्पा | ०.५अ |
| डिटेंट टॉर्क | ≤११० ग्रॅम.सेमी |
| कमाल खेचण्याचा दर | ४०० पीपीएस |
| होल्डिंग टॉर्क | ४५० ग्रॅम.सेमी |
| वळणाचे तापमान | ≤८५ हजार |
| डिडलेक्ट्रिक सामर्थ्य | ६०० व्हीएसी १ सेकंद १ एमए |
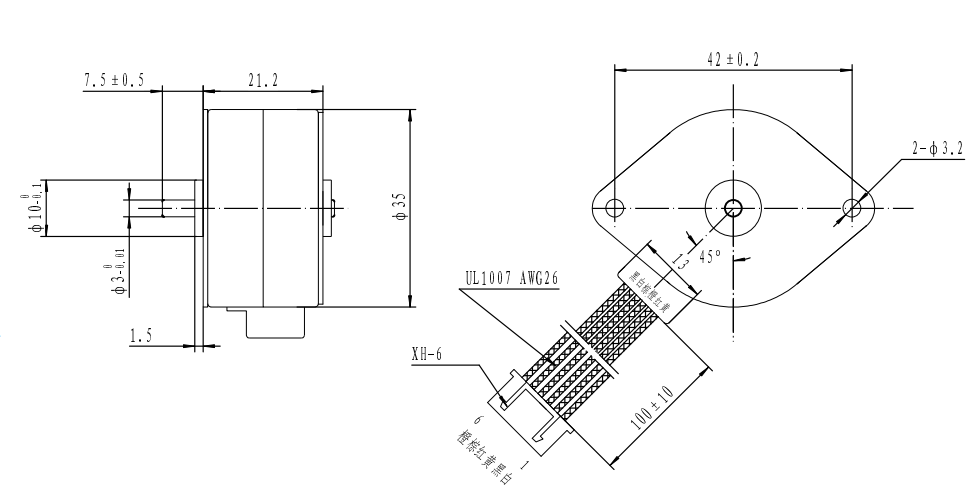
डिझाइन रेखाचित्र
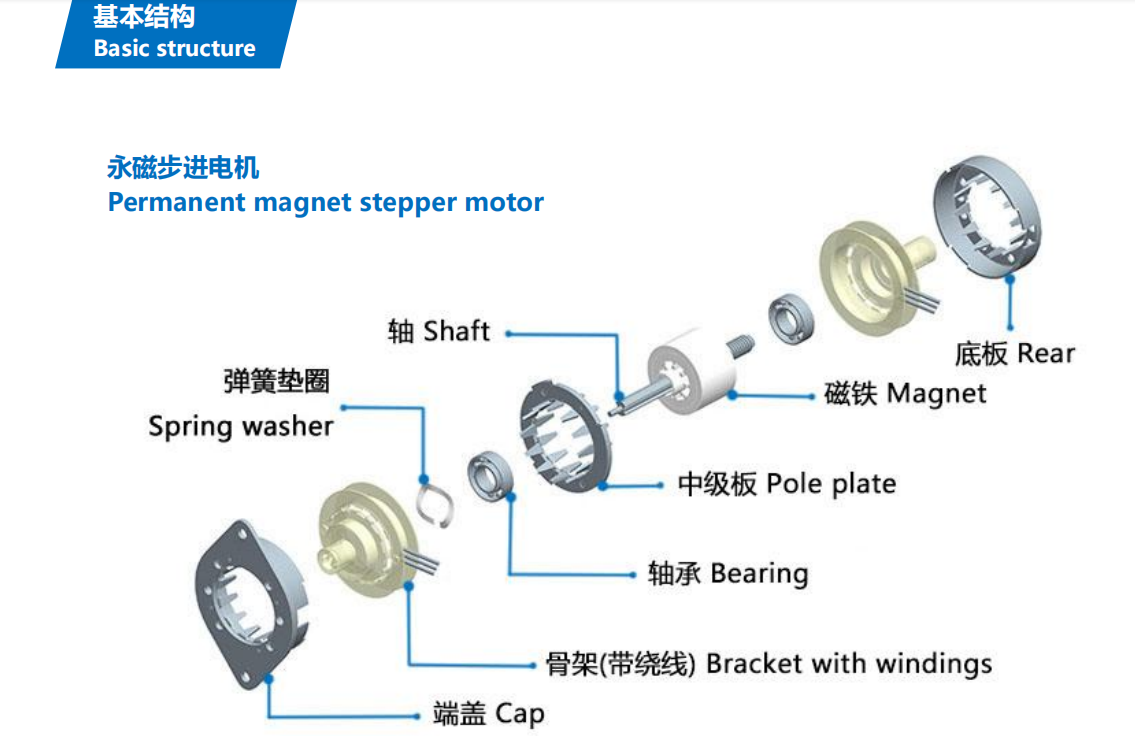
पीएम स्टेपर मोटरच्या मूलभूत रचनेबद्दल
वैशिष्ट्ये आणि फायदे
१. उच्च अचूकतेचे स्थान निश्चितीकरण
स्टेपर मोटर्स अचूक आणि पुनरावृत्ती होणाऱ्या टप्प्यांमध्ये फिरत असल्यामुळे, अचूकतेची आवश्यकता असलेल्या ॲप्लिकेशन्समध्ये ते उत्कृष्ट ठरतात.
मोटरच्या हालचालींच्या संख्येनुसार स्थिती निश्चित करणे.
२. उच्च अचूकतेचे गती नियंत्रण
हालचालीच्या अचूक टप्प्यांमुळे प्रक्रियेच्या फिरण्याच्या गतीवर उत्कृष्ट नियंत्रण ठेवता येते.
स्वयंचलन आणि रोबोटिक्स. फिरण्याचा वेग स्पंदांच्या वारंवारतेनुसार ठरवला जातो.
३. पॉज आणि होल्डिंग फंक्शन
ड्राइव्हच्या नियंत्रणासह, मोटरमध्ये लॉक फंक्शन आहे (मोटरच्या विंडिंगमधून विद्युत प्रवाह वाहत असतो, परंतु
मोटर फिरत नसतानाही, होल्डिंग टॉर्क आउटपुट मिळत राहतो.
४. दीर्घायुष्य आणि कमी विद्युत चुंबकीय हस्तक्षेप
स्टेपर मोटरला ब्रशेस नसतात, आणि ब्रश असलेल्या मोटरप्रमाणे तिला ब्रशेसद्वारे कम्युटेशनची आवश्यकता नसते.
डीसी मोटर. यामध्ये ब्रशेसचे घर्षण होत नाही, ज्यामुळे आयुर्मान वाढते, विजेच्या ठिणग्या पडत नाहीत आणि विद्युतचुंबकीय हस्तक्षेप कमी होतो.
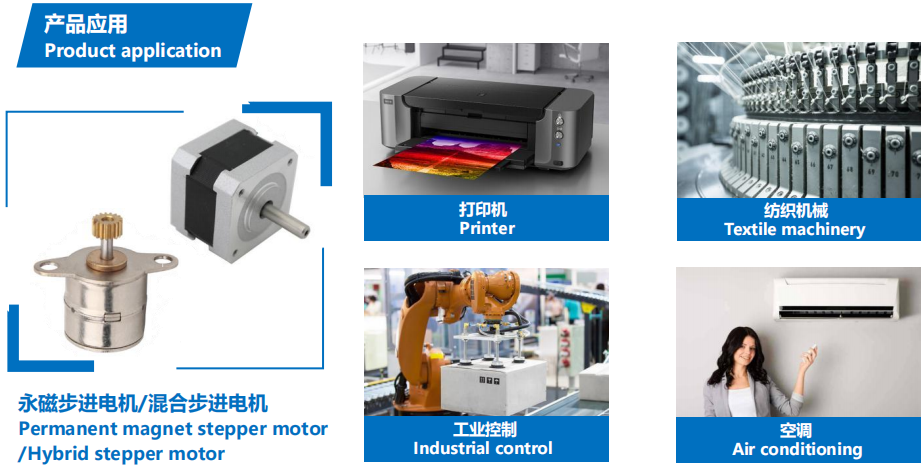
पीएम स्टेपर मोटरचा वापर
प्रिंटर
वस्त्रोद्योग यंत्रसामग्री
औद्योगिक नियंत्रण
वातानुकूलन
स्टेपर मोटरचे कार्य तत्त्व
स्टेपर मोटरची ड्राइव्ह सॉफ्टवेअरद्वारे नियंत्रित केली जाते. जेव्हा मोटरला फिरवण्याची आवश्यकता असते, तेव्हा ड्राइव्ह सुरू होईल.
स्टेपर मोटरला पल्स द्या. हे पल्स स्टेपर मोटरला एका विशिष्ट क्रमाने ऊर्जा देतात, त्यामुळे
मोटरच्या रोटरला एका विशिष्ट दिशेने (घड्याळाच्या दिशेने किंवा विरुद्ध दिशेने) फिरवणे. जेणेकरून
मोटरचे योग्य रोटेशन (फिरणे) साध्य करणे. प्रत्येक वेळी जेव्हा मोटरला ड्रायव्हरकडून पल्स (स्पंद) मिळतो, तेव्हा ती एका स्टेप अँगलने (फुल-स्टेप ड्राइव्हसह) फिरेल आणि मोटरच्या फिरण्याचा कोन हा दिलेल्या पल्सची संख्या आणि स्टेप अँगलवर अवलंबून असतो.
वितरण कालावधी आणि पॅकेजिंग माहिती
नमुने मिळण्यास लागणारा वेळ:
स्टँडर्ड मोटर्स स्टॉकमध्ये: ३ दिवसांच्या आत
स्टँडर्ड मोटर्स स्टॉकमध्ये उपलब्ध नाहीत: १५ दिवसांच्या आत
सानुकूलित उत्पादने: सुमारे २५~३० दिवस (सानुकूलनाच्या जटिलतेवर अवलंबून)
नवीन साचा बनवण्यासाठी लागणारा वेळ: साधारणपणे ४५ दिवस
मोठ्या प्रमाणावरील उत्पादनासाठी लागणारा वेळ: ऑर्डरच्या संख्येवर अवलंबून
पॅकेजिंग:
नमुने फोम स्पंजमध्ये गुंडाळून कागदी बॉक्समध्ये ठेवले जातात आणि एक्सप्रेसने पाठवले जातात.
मोठ्या प्रमाणावरील उत्पादनासाठी, मोटर्स बाहेरून पारदर्शक फिल्म असलेल्या नालीदार पुठ्ठ्याच्या खोक्यांमध्ये पॅक केल्या जातात. (विमानमार्गे वाहतूक)
सागरी मार्गाने पाठवायचे असल्यास, उत्पादन पॅलेट्सवर पॅक केले जाईल.

पेमेंट पद्धत आणि पेमेंटच्या अटी
नमुन्यांसाठी, आम्ही साधारणपणे पेपल किंवा अलिबाबा स्वीकारतो.
मोठ्या प्रमाणावरील उत्पादनासाठी आम्ही टी/टी पेमेंट स्वीकारतो.
नमुन्यांसाठी, आम्ही उत्पादनापूर्वी संपूर्ण रक्कम घेतो.
मोठ्या प्रमाणावरील उत्पादनासाठी, आम्ही उत्पादनापूर्वी ५०% आगाऊ रक्कम स्वीकारू शकतो आणि उर्वरित ५०% रक्कम मालाच्या पाठवणीपूर्वी घेऊ शकतो.
आपण सहापेक्षा जास्त वेळा एकत्र काम केल्यानंतर, आपण ए/एस (आफ्टर साईट) सारख्या इतर पेमेंट अटींवर वाटाघाटी करू शकतो.
तुमचा संदेश आम्हाला पाठवा:
उत्पादन श्रेणी
-

कमी आवाज, उच्च दर्जाचा ३.३V ६mm मायक्रो स्टेपर...
-

२० मिमी मायक्रो स्टेपर मोटर जी... सोबत जुळवता येते.
-

२० मिमी कायमस्वरूपी चुंबक १२ व्होल्ट मायक्रो स्टेपर मोटरसाठी...
-
८ मिमी मिनी मायक्रो स्टेपर मोटर २ फेज १८ डिग्री ...
-

१० बाय मिनी ५ व्होल्ट १० मिमी व्यासाची मायक्रो स्टेपर मोटर...
-

१५ बाय मायक्रो स्टेपर मोटर २-फेज ४-वायर १८ डिग्री...