




NEMA34 86mm लिनियर हायब्रीड स्टेपर मोटर एक्सटर्नल ड्राइव्ह हाय थ्रस्ट
वर्णन
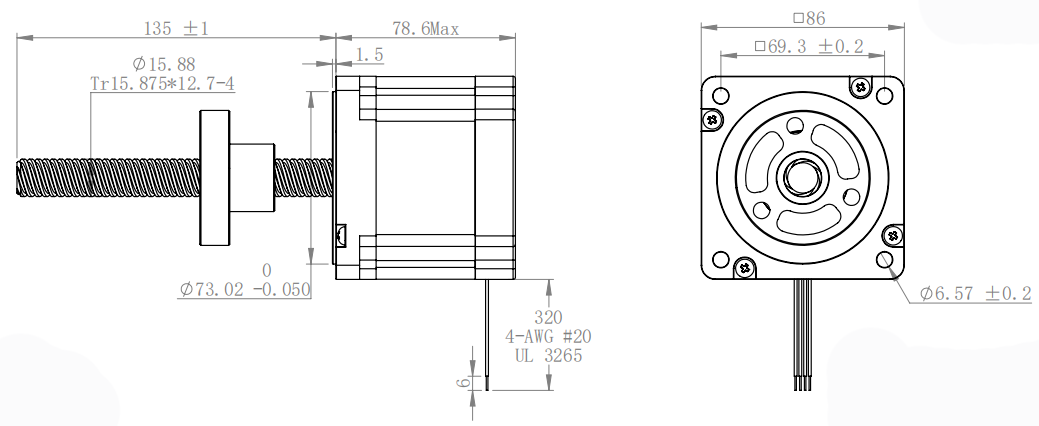
NEMA 34 हायब्रीड स्टेपर मोटरचा आकार ८६ मिमी आहे.
ही एक एक्सटर्नल ड्राइव्ह लिनियर स्टेपर मोटर असून, तिच्या वरच्या बाजूला १३५ मिमी लांबीचा लीड स्क्रू शाफ्ट आहे आणि तिला प्लास्टिकचा नट/स्लाइड देखील बसतो.
लीड स्क्रूचा मॉडेल क्रमांक आहे: Tr15.875*P3.175*4N
लीड स्क्रूचे पिच ३.१७ मिमी आहे आणि त्याला ४ स्टार्ट्स आहेत, म्हणून लीड = स्टार्ट्सची संख्या * लीड स्क्रू पिच = ४ * ३.१७५ मिमी = १२.७ मिमी
म्हणून मोटरच्या स्टेपची लांबी आहे: 12.7mm/200 स्टेप्स = 0.0635mm/स्टेप
आमच्याकडे पर्यायांसाठी इतर लीड स्क्रू प्रकार देखील उपलब्ध आहेत, ते ग्राहकाच्या मोटरच्या थ्रस्ट आणि लिनियर स्पीडच्या गरजेवर अवलंबून असते.

पॅरामीटर्स
| मॉडेल क्रमांक | एसएम८६सी०९०५ |
| मोटरचा व्यास | ८६ मिमी (NEMA34) |
| ड्राइव्ह व्होल्टेज | 5व्ही डीसी |
| कॉइल प्रतिरोध | १.६Ω±१०%/फेज |
| टप्प्यांची संख्या | २ टप्पे(बायपोलर) |
| पायरीचा कोन | 1.८°/पायरी |
| सध्याचा दर | ३.१२A/फेज |
| किमान थ्रस्ट (300PPS) | ५० किलो |
| पायरीची लांबी | ०.०६३५ मिमी/स्टेप |
लीड स्क्रू पॅरामीटर
| लीड स्क्रू प्रकार | समलंब स्क्रू |
| लीड स्क्रू मॉडेल क्र. | Tr15.875*P3.175*4N |
| बाह्य व्यास | १५.८७५ मिमी |
| नेतृत्व | १२.७ मिमी |
| सुरुवात होते | 4 |
| पिच | ३.१७५ मिमी |
| पायरीची लांबी | ०.०६३५ मिमी/स्टेप |
डिझाइन रेखाचित्र
लीड स्क्रूबद्दल
लिनियर हायब्रीड स्टेपर मोटरवर वापरला जाणारा लीड स्क्रू सामान्यतः ट्रॅपेझॉइडल (समलंब चौकोनी) असतो.
उदाहरणार्थ Tr3.5*P0.3*1N लीड स्क्रूसाठी.
Tr म्हणजे ट्रॅपेझॉइडल लीड स्क्रू प्रकार
P0.3 म्हणजे लीड स्क्रूचा पिच 0.3 मिमी आहे.
1N म्हणजे तो सिंगल स्टार्ट लीड स्क्रू आहे.
लीड स्क्रू लीड = सुरुवातीचा क्रमांक * पिच
तर या विशिष्ट लीड स्क्रूसाठी, 0.3mm लीड लागते.
हायब्रीड स्टेपर मोटरचा स्टेपर अँगल १.८ डिग्री/स्टेप आहे, ज्यामुळे एक फेरी फिरण्यासाठी २०० स्टेप्स लागतात.
स्टेप लेंथ म्हणजे मोटरने एकच पाऊल टाकताना केलेली रेषीय हालचाल होय.
०.३ मिमी लीड स्क्रूसाठी, स्टेपची लांबी ०.३ मिमी/२०० स्टेप = ०.००१५ मिमी/स्टेप आहे.
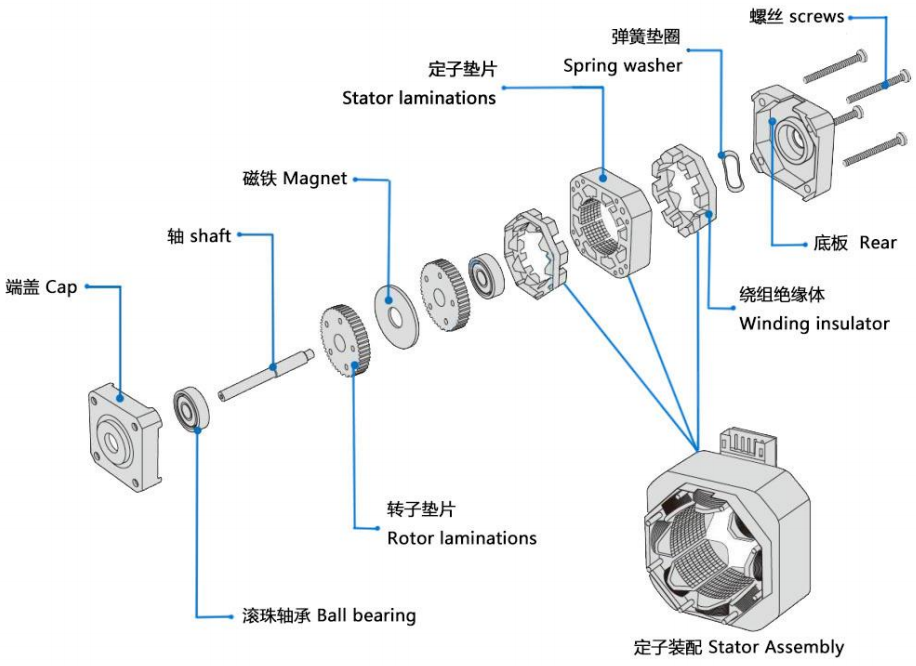
NEMA स्टेपर मोटर्सची मूलभूत रचना
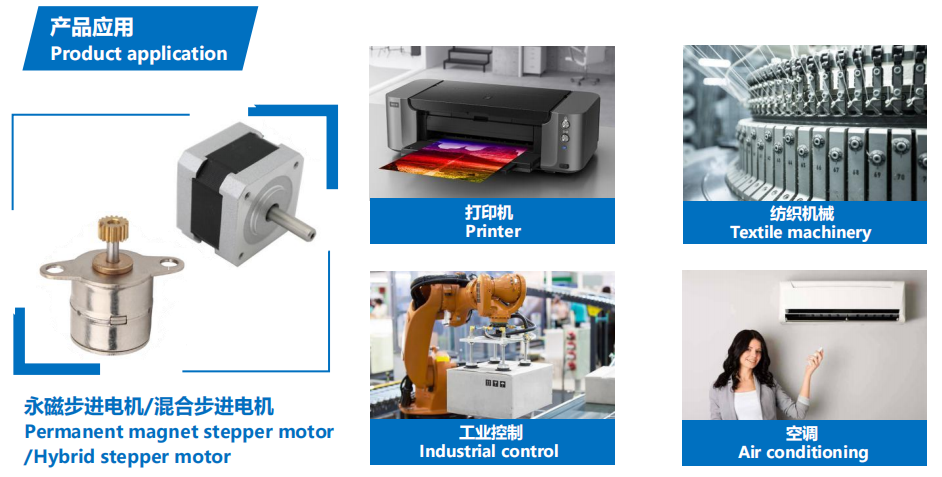
हायब्रीड स्टेपर मोटरचा वापर
हायब्रीड स्टेपर मोटरच्या उच्च रिझोल्यूशनमुळे (प्रति प्रदक्षिणा २०० किंवा ४०० स्टेप्स), त्यांचा वापर उच्च अचूकता आवश्यक असलेल्या अनुप्रयोगांमध्ये मोठ्या प्रमाणावर केला जातो, जसे की:
३डी प्रिंटिंग
औद्योगिक नियंत्रण (सीएनसी, स्वयंचलित मिलिंग मशीन, वस्त्रोद्योग यंत्रसामग्री)
संगणक उपकरणे
पॅकिंग मशीन
आणि उच्च अचूक नियंत्रणाची आवश्यकता असलेल्या इतर स्वयंचलित प्रणाली.
ग्राहकांनी “आधी स्टेपर मोटर निवडावी, त्यानंतर सध्याच्या स्टेपर मोटरच्या आधारावर ड्रायव्हर निवडावा” या तत्त्वाचे पालन करावे.
हायब्रीड स्टेपिंग मोटर चालवण्यासाठी फुल-स्टेप ड्रायव्हिंग मोड न वापरणेच उत्तम, कारण फुल-स्टेप ड्रायव्हिंगमध्ये कंपन अधिक तीव्र असते.
हायब्रीड स्टेपर मोटर कमी वेगाच्या प्रसंगांसाठी अधिक योग्य आहे. आम्ही सुचवितो की वेग १००० आरपीएम (०.९ अंशांवर ६६६६ पीपीएस) पेक्षा जास्त नसावा, शक्यतो १०००-३००० पीपीएस (०.९ अंश) दरम्यान असावा, आणि वेग कमी करण्यासाठी याला गिअरबॉक्स जोडला जाऊ शकतो. योग्य फ्रिक्वेन्सीवर या मोटरची कार्यक्षमता उच्च असते आणि आवाज कमी असतो.
ऐतिहासिक कारणांमुळे, केवळ नाममात्र १२V व्होल्टेज असलेली मोटरच १२V वापरते. डिझाइन ड्रॉइंगवरील इतर रेटेड व्होल्टेज हे मोटरसाठी सर्वात योग्य ड्रायव्हिंग व्होल्टेज असेलच असे नाही. ग्राहकांनी स्वतःच्या गरजेनुसार योग्य ड्रायव्हिंग व्होल्टेज आणि योग्य ड्रायव्हर निवडावा.
जेव्हा मोटर जास्त वेगाने किंवा मोठ्या भारासह वापरली जाते, तेव्हा ती सामान्यतः थेट कार्यरत वेगाने सुरू होत नाही. आम्ही वारंवारता आणि वेग हळूहळू वाढवण्याचा सल्ला देतो. याची दोन कारणे आहेत: पहिले, मोटरचे टप्पे (स्टेप्स) चुकत नाहीत आणि दुसरे, यामुळे आवाज कमी होतो व स्थिती निश्चितीची अचूकता सुधारते.
मोटर कंपनाच्या क्षेत्रात (६०० पीपीएस पेक्षा कमी) चालवू नये. जर ती कमी वेगाने वापरायचीच असेल, तर व्होल्टेज, करंट बदलून किंवा थोडे डॅम्पिंग जोडून कंपनाची समस्या कमी करता येते.
जेव्हा मोटर 600PPS (0.9 अंश) पेक्षा कमी वेगाने काम करते, तेव्हा तिला कमी विद्युत प्रवाह, जास्त प्रेरकत्व आणि कमी व्होल्टेजने चालवले पाहिजे.
जास्त जडत्व परिबल असलेल्या भारांसाठी, मोठ्या आकाराची मोटर निवडली पाहिजे.
जेव्हा अधिक अचूकतेची आवश्यकता असते, तेव्हा गिअरबॉक्स जोडून, मोटरचा वेग वाढवून किंवा सबडिव्हिजन ड्रायव्हिंगचा वापर करून ही समस्या सोडवता येते. तसेच ५-फेज मोटर (युनिपोलर मोटर) देखील वापरता येते, परंतु संपूर्ण प्रणालीची किंमत तुलनेने जास्त असल्यामुळे तिचा वापर क्वचितच केला जातो.
स्टेपर मोटरचा आकार:
सध्या आमच्याकडे 20mm(NEMA8), 28mm(NEMA11), 35mm(NEMA14), 42mm(NEMA17), 57mm(NEMA23), 86mm(NEMA34) हायब्रीड स्टेपर मोटर्स उपलब्ध आहेत. तुम्ही हायब्रीड स्टेपर मोटर निवडताना, प्रथम मोटरचा आकार निश्चित करावा आणि नंतर इतर पॅरामीटर्सची पुष्टी करावी, असे आम्ही सुचवतो.
सानुकूलन सेवा
ग्राहकाच्या गरजेनुसार मोटरच्या डिझाइनमध्ये बदल केला जाऊ शकतो, ज्यामध्ये खालील बाबींचा समावेश आहे:
मोटरचा व्यास: आमच्याकडे ६ मिमी, ८ मिमी, १० मिमी, १५ मिमी आणि २० मिमी व्यासाच्या मोटर उपलब्ध आहेत.
कॉइल रेझिस्टन्स / रेटेड व्होल्टेज: कॉइल रेझिस्टन्स समायोजित करता येतो आणि रेझिस्टन्स जितका जास्त असतो, तितका मोटरचा रेटेड व्होल्टेज जास्त असतो.
ब्रॅकेट डिझाइन/ लीड स्क्रूची लांबी: जर ग्राहकाला ब्रॅकेट अधिक लांब/लहान हवा असेल, तर माउंटिंग होलसारख्या विशेष डिझाइनद्वारे तो समायोजित केला जाऊ शकतो.
पीसीबी + केबल्स + कनेक्टर: पीसीबीचे डिझाइन, केबलची लांबी आणि कनेक्टर पिच हे सर्व समायोजित करण्यायोग्य आहेत, ग्राहकांच्या गरजेनुसार ते एफपीसीमध्ये बदलले जाऊ शकतात.
लीड टाइम
जर आमच्याकडे नमुने स्टॉकमध्ये असतील, तर आम्ही ३ दिवसांत नमुने पाठवू शकतो.
जर आमच्याकडे नमुने स्टॉकमध्ये नसतील, तर आम्हाला ते तयार करावे लागतील, ज्यासाठी सुमारे २० दिवसांचा कालावधी लागतो.
मोठ्या प्रमाणावरील उत्पादनासाठी लागणारा वेळ ऑर्डरच्या प्रमाणावर अवलंबून असतो.
पेमेंट पद्धत आणि पेमेंटच्या अटी
नमुन्यांसाठी, आम्ही साधारणपणे पेपल किंवा अलिबाबा स्वीकारतो.
मोठ्या प्रमाणावरील उत्पादनासाठी आम्ही टी/टी पेमेंट स्वीकारतो.
नमुन्यांसाठी, आम्ही उत्पादनापूर्वी संपूर्ण रक्कम घेतो.
मोठ्या प्रमाणावरील उत्पादनासाठी, आम्ही उत्पादनापूर्वी ५०% आगाऊ रक्कम स्वीकारू शकतो आणि उर्वरित ५०% रक्कम मालाच्या पाठवणीपूर्वी घेऊ शकतो.
आपण सहापेक्षा जास्त वेळा एकत्र काम केल्यानंतर, आपण ए/एस (आफ्टर साईट) सारख्या इतर पेमेंट अटींवर वाटाघाटी करू शकतो.
वारंवार विचारले जाणारे प्रश्न
१. नमुन्यांच्या वितरणासाठी साधारणपणे किती वेळ लागतो? बॅक-एंडच्या मोठ्या ऑर्डर्सच्या वितरणासाठी किती वेळ लागतो?
नमुना ऑर्डरसाठी लागणारा वेळ सुमारे १५ दिवस आहे, तर मोठ्या प्रमाणातील ऑर्डरसाठी २५-३० दिवस लागतात.
२. तुम्ही ग्राहकांच्या गरजेनुसार सेवा स्वीकारता का?
आम्ही मोटर पॅरामीटर, लीड वायरचा प्रकार, आउट शाफ्ट इत्यादींसह उत्पादनांचे कस्टमायझेशन स्वीकारतो.
३. या मोटरला एन्कोडर जोडणे शक्य आहे का?
या प्रकारच्या मोटरसाठी, आपण मोटर वेअर कॅपवर एन्कोडर लावू शकतो.
वारंवार विचारले जाणारे प्रश्न
स्टेपर मोटरच्या बायपोलर आणि युनिपोलर वायरिंगमध्ये काय फरक आहे?
बायपोलर कनेक्शन असलेल्या स्टेपर मोटर्समध्ये एक अशी ड्राइव्ह पद्धत वापरली जाते ज्यामध्ये एका वाइंडिंगमध्ये दोन्ही दिशांनी विद्युत प्रवाह वाहतो (बायपोलर ड्राइव्ह).
सिंगल-पोल कनेक्शन असलेल्या स्टेपर मोटरला एक मध्यवर्ती टॅप असतो आणि ती अशी ड्राइव्ह पद्धत वापरते ज्यामध्ये एका वाइंडिंगमध्ये करंट नेहमी एका निश्चित दिशेने वाहतो (सिंगल-पोल ड्राइव्ह).
२. स्टार्ट-स्टॉप ऑपरेशन मोडमध्ये स्टेपर मोटर सुरू न होण्याची कारणे आणि उपाययोजना
अ. भार खूप जास्त आहे: मोटर निवडीत त्रुटी आहे, मोठ्या आकाराची मोटर निवडा.
b. वारंवारता खूप जास्त आहे: वारंवारता कमी करा
c. जर मोटर पुढे-मागे दोलन करत असेल, किंवा टॉर्क खूप कमी असेल, तर याचा अर्थ फेज खराब झाला आहे किंवा सर्किट तुटले आहे: मोटर बदला किंवा दुरुस्त करा.
d. फेज करंट पुरेसा नाही: किमान सुरू करण्याच्या पहिल्या काही टप्प्यांसाठी तरी फेज करंट वाढवा.
3. प्रवेग पूर्ण करूनही स्थिर गतीला पोहोचल्यावर फिरणे थांबवणाऱ्या स्टेपर मोटर्सची कारणे आणि उपाय.
कारण: स्टेपर मोटर तिच्या क्षमतेच्या मर्यादेपर्यंत चालत आहे आणि अत्याधिक प्रवेगमुळे थांबते. रोटर कंप पावतो आणि अस्थिरपणे चालतो.
उपाय.
①त्वरण कमी करा, म्हणजेच कमी त्वरण निवडा किंवा त्वरणाचे दोन वेगवेगळे स्तर वापरा, सुरुवातीला जास्त आणि कमाल वेगाजवळ कमी.
② टॉर्क वाढवा
③मागील शाफ्टला मेकॅनिकल डॅम्पर जोडा, परंतु यामुळे रोटरची जडत्व वाढते.
④उपविभागाची ड्राईव्ह घ्या
तुमचा संदेश आम्हाला पाठवा:
उत्पादन श्रेणी
-
२० मिमी NEMA8 लिनियर हायब्रीड स्टेपर मोटर रनसह...
-

२८ मिमी आकाराची NEMA11 हायब्रीड स्टेपर मोटर १.८ डिग्री...
-

प्लॅनेटरी गिअरबॉक्स स्टेपर मोटर ३५ मिमी (NEMA 14) ...
-

NEMA8 20mm हायब्रीड स्टेपर मोटर 1.8 डिग्री स्टेप...
-

उच्च सुस्पष्टता असलेली ४२ मिमी स्टेपर मोटर NEMA 17 हायब्रीड...
-

NEMA 6 उच्च अचूकता द्वि-फेज 4-वायर 14mm हायब्रीड...